
A Tiny LEGO Rover
When I saw
Bert van Dam's
BEAM Walker I knew I had to build a tiny rover. The requirements:
- Small! A frame no longer than 8 studs.
- Powered, capable of steering to avoid obstacles.
- At least one sensor to detect obstacles.
- Not required to carry the RCX, but use as
few tether wires as possible.
Drivetrain
Initially I planned to use one micromotor and a wheel design that would
cause the rover to turn while backing up (ala
mini-R2D2).
While experimenting with swivel wheel designs I realized that a micromotor
was going to be smaller than anything I could come up with to let a technic
wheel pivot back and forth. Adding the second micromotor meant another
wire tethered to the rover, but it would give me differential steering and
a smaller footprint. Each wheel is attached by a
technic axle 3 with stud
and spaced out from the body using two half bushings, one of which is
driven by a small white rubber band connected to the micromotor. Together
with wheel diameter, this gears up the micromotor significantly to get some
speed. I started with the next smaller
size of technic wheel, but in the end more ground clearance and higher
traction were more important.
Bumper
The tricky part turned out to be the bumper design. I wanted it to be small,
but wide enough to hit anything in front of the rover. Because of the very
low speed provided by the micromotors, it had to be very sensitive. The
result is a transverse mounted switch, with a carefully tensioned bumper to
trigger it:

The most critical part of the contruction is the bumper tensioner, which
holds the bar mechanism up high enough that a tiny force from the front
of the rover will activate it. The bumper is attached by a 5 stud long
axle, and in the center of the frame there is a cam which strikes an
inverted ramp brick:
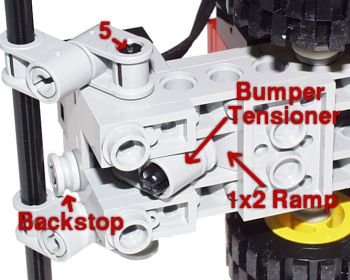
The 2 axle with half bushing must be carefully adjusted so that the slightest
pressure on the bumper triggers the switch. The half bushing on a 3 axle
through the button's axle hole serves as a backstop which prevents the
bumper arm from getting hung up on the button. That way the button's own
internal spring can push the bumper back down.
Software
Since it uses differential steering and has a single front bumper, it works
fine with the Scout's built in Forward/Avoid code (which I believe is default
program 5 on the RCX).
Larger Pictures
Right Side
Left Side
Bottom
![[Ben Jackson's Home]](../../bj2-icon.gif)
![[LEGO Raytracing Home]](../1708-house-icon.gif)
![[Mindstorm]](rcx-icon.jpg)